BulletArm Baselines
This subpackage implements a collection of state-of-the-art baseline algorithms to benchmark new methods against. The algorithms provided cover a wide range of state and action spaces for either open-loop control or close-loop control. Additionally, we provide a number of logging and plotting utilities for ease of use.
Open-Loop Benchmarks
Prerequisite
Install PyTorch (Recommended: pytorch==1.7.0, torchvision==0.8.1)
(Optional, required for 6D benchmark) Install CuPy
Install other required packages
pip install -r baseline_requirements.txt
Goto the baseline directory
cd helping_hands_rl_envs/helping_hands_rl_baselines/fc_dqn/scripts
Open-Loop 2D Benchmarks
python main.py --algorithm=[algorithm] --architecture=[architecture] --action_sequence=xyp --random_orientation=f --env=[env]
Select
[algorithm]from:sdqfd(recommended),dqfd,adet,dqnSelect
[architecture]from:equi_fcn(recommended),cnn_fcnAdd
--fill_buffer_deconstructto use deconstruction planner for gathering expert data.
Open-Loop 3D Benchmarks
python main.py --algorithm=[algorithm] --architecture=[architecture] --env=[env]
Select
[algorithm]from:sdqfd(recommended),dqfd,adet,dqnSelect
[architecture]from:equi_asr(recommended),cnn_asr,equi_fcn,cnn_fcn,rot_fcnAdd
--fill_buffer_deconstructto use deconstruction planner for gathering expert data.
Open-Loop 6D Benchmarks
python main.py --algorithm=[algorithm] --architecture=[architecture] --action_sequence=xyzrrrp --patch_size=[patch_size] --env=[env]
Select
[algorithm]from:sdqfd(recommended),dqfd,adet,dqnSelect
[architecture]from:equi_deictic_asr(recommended),cnn_asrSet
[patch_size]to be40(recommended, required for bumpy_box_palletizing environment) or24Add
--fill_buffer_deconstructto use deconstruction planner for gathering expert data.
Additional Training Arguments
Close-Loop Benchmarks
Prerequisite
Install PyTorch (Recommended: pytorch==1.7.0, torchvision==0.8.1)
Install other required packages
pip install -r baseline_requirements.txt
Goto the baseline directory
cd helping_hands_rl_envs/helping_hands_rl_baselines/equi_rl/scripts
Close-Loop 3D Benchmarks
python main.py --algorithm=[algorithm] --action_sequence=pxyz --random_orientation=f --env=[env]
Select
[algorithm]from:sac,sacfd,equi_sac,equi_sacfd,ferm_sac,ferm_sacfd,rad_sac,rad_sacfd,drq_sac,drq_sacfd
Close-Loop 4D Benchmarks
python main.py --algorithm=[algorithm] --env=[env]
Select [algorithm] from:
sac,sacfd,equi_sac,equi_sacfd,ferm_sac,ferm_sacfd,rad_sac,rad_sacfd,drq_sac,drq_sacfdTo use PER and data augmentation buffer, add
--buffer=per_expert_aug
Additional Training Arguments
Logging & Plotting Utilities
To assist with debugging new algorithms, we include the logging and plotting tools which we use for the baselines. The logger wraps Tensorboard
and provides numerous functions to log various details of the training process. An example of the information the logger displays can be seen below.
In addition to the default data, any additional data can be added as desired using the updateScalars() function. The plotter is currently in
its infancy but provides a easy way to plot and compare different algorithms when using the provided logger.
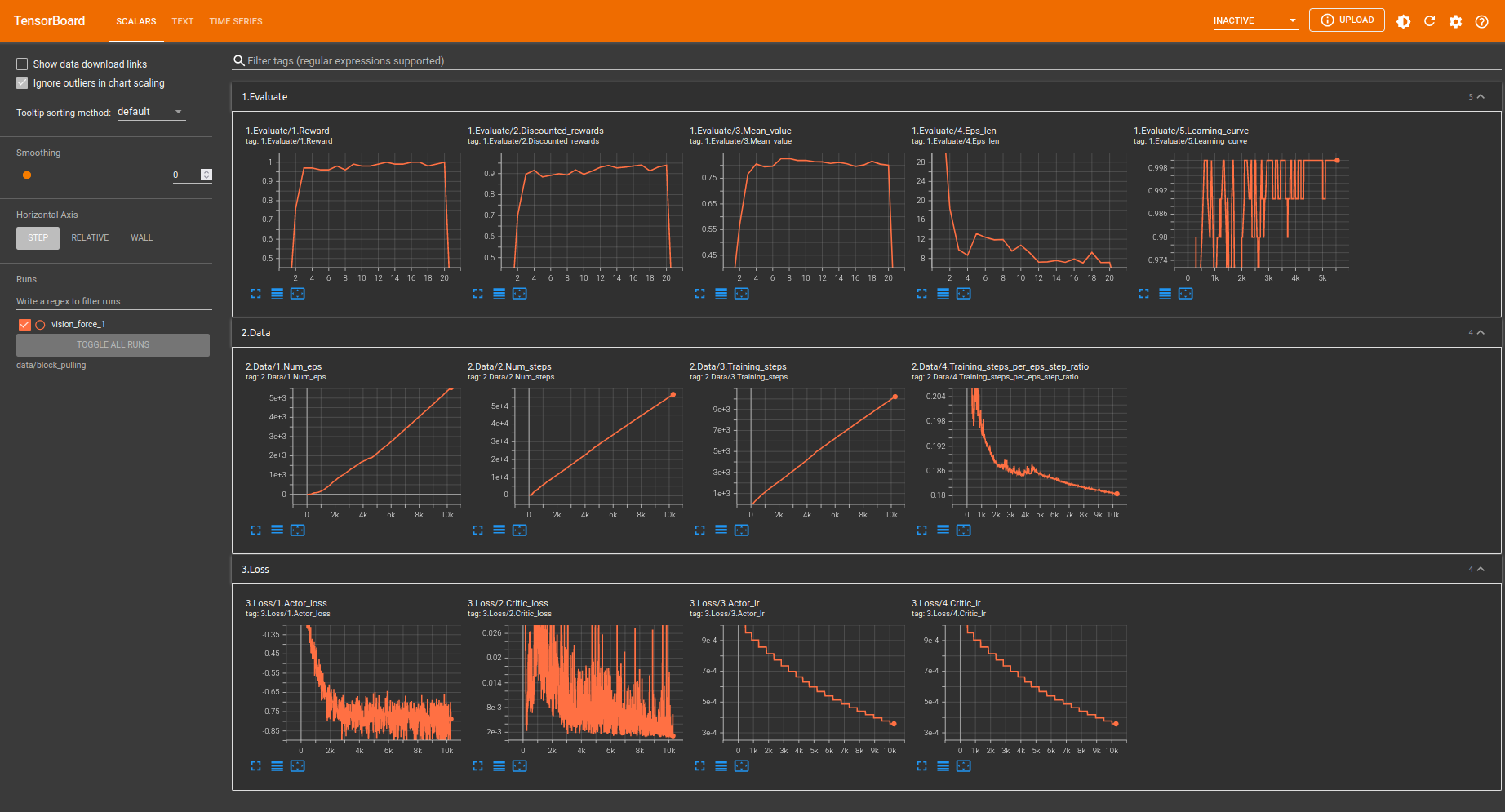
An example run showing the default information captured by the logger.
Logger
- class Logger(results_path, checkpoint_interval=500, num_eval_eps=100, hyperparameters=None)[source]
Logger class. Writes log data to tensorboard.
- Parameters
results_path (str) – Path to save log files to
num_eval_eps (int) – Number of episodes in a evaluation iteration
hyperparameters (dict) – Hyperparameters to log. Defaults to None
- exportData()[source]
Export log data as a pickle
- Parameters
filepath (str) – The filepath to save the exported data to
- getAvg(l, n=0)[source]
Numpy mean wrapper to handle empty lists.
- Parameters
l (list[float]) – The list
n (int) – Number of trail elements to average over. Defaults to entire list.
- Returns
List average
- Return type
float
- getCurrentLoss(n=100)[source]
Calculate the average loss of previous n steps :param n: the number of previous training steps to calculate the average loss
- Returns
the average loss value
- getScalars(keys)[source]
Get data from the scalar log dict.
- Parameters
keys (str | list[str]) – Key or list of keys to get from the scalar log dict
- Returns
- Single object when single key is passed or dict containing objects from
all keys
- Return type
Object | Dict
- loadCheckPoint(checkpoint_dir, agent_load_func, buffer_load_func)[source]
Load the checkpoint
- Parameters
checkpoint_dir – the directory of the checkpoint to load
agent_load_func (func) – the agent’s loading checkpoint function. agent_load_func must take a dict as input to load the agent’s checkpoint
buffer_load_func (func) – the buffer’s loading checkpoint function. buffer_load_func must take a dict as input to load the buffer’s checkpoint
- logEvalEpisode(rewards, values=None, discounted_return=None)[source]
Log a evaluation episode.
- Parameters
(list[float] (rewards) – Rewards for the episode
values (list[float]) – Values for the episode
discounted_return (list[float]) – Discounted return of the episode
- logStep(rewards, done_masks)[source]
Log episode step.
- Parameters
rewards (list[float]) – List of rewards
done_masks (list[int]) –
- logTrainingEpisode(rewards)[source]
Log a episode.
- Parameters
(list[float] (rewards) – Rewards for the entire episode
- saveCheckPoint(agent_save_state, buffer_save_state)[source]
Save the checkpoint
- Parameters
agent_save_state (dict) – the agent’s save state for checkpointing
buffer_save_state (dict) – the buffer’s save state for checkpointing
- saveParameters(parameters)[source]
Save the parameters as a json file
- Parameters
parameters – parameter dict to save