BulletArm Simulator
This is the main package for the BulletArm library. It contains the PyBullet simulation environments, robots, and task definitions. The simulation workspace consists of a robot arm mounted on the floor of the simulation environment, a workspace where objects are generated, and sensor(s). There are three key terms within BulletArm: Enviornment, Configuration, and Episode. An environment is an instance ofthe PyBullet simulator in which the robot interacts with objects while trying to solve some task. This include the initial environment state, the reward function, and termination requirements. A configuration contains additional specifications for the task such as the robot arm, the size of the workspace, the physics mode, etc. A full list of parameters can be found here. Episodes are generated by taking actions (steps) within an environment until the episode ends.
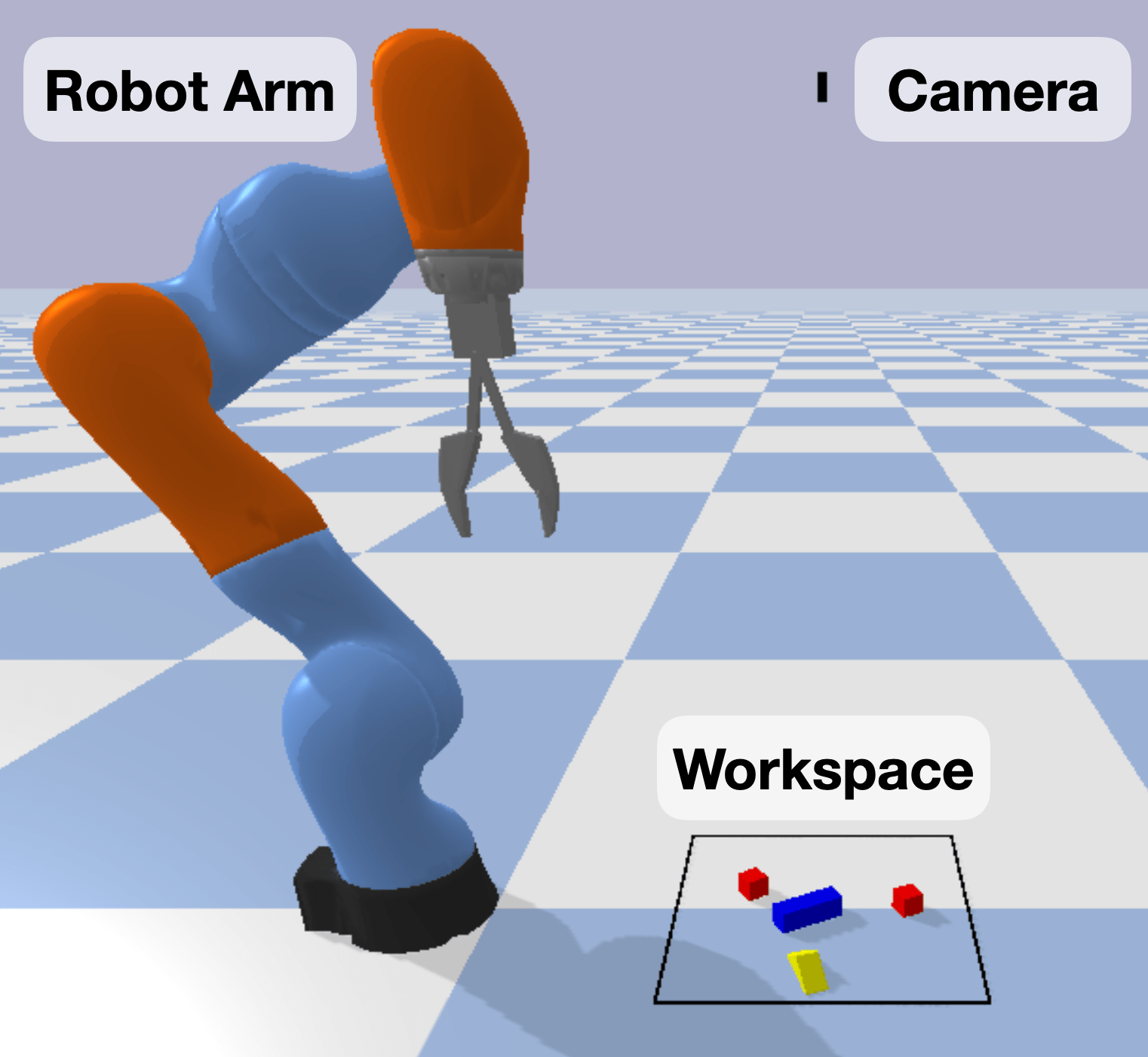
The simulation environment containing a robot arm, a camera, and a workspace.
Tasks
Our set of tasks are seperated into two categories based on the action space: open-loop control and closed-loop control.
Future work is planned to allow all tasks to use either control-type but for now the below table shows current avaliable
control type for each task. For each avaliable task, the name required by the EnvFactory to initalize that task
is also shown.
Task |
Open-Loop |
Closed-Loop |
|---|---|---|
☐ |
☑ |
|
☐ |
☑ |
|
☐ |
☑ |
|
☑ |
☑ |
|
☑ |
☑ |
|
☐ |
☑ |
|
☑ |
☑ |
|
☑ |
☐ |
|
☑ |
☐ |
|
☑ |
☐ |
|
☑ |
☐ |
|
☑ |
☐ |
|
☑ |
☐ |
|
☑ |
☐ |
|
☑ |
☐ |
|
☑ |
☐ |
|
☐ |
☑ |
|
☐ |
☑ |
|
☑ |
☑ |
EnvFactory & EnvRunner
Interaction with BulletArm is done through the EnvFactory and EnvRunner classes.
The EnvFactory is the entry point and creates the environment specified by the configuration passed as input. The EnvFactory
can create either a single environment (SingleRunner) or multiple environments (MultiRunner) to be run in parallel.
The EnvRunner provides the API which interacts with the environment. This API is modeled after the typical agent-environment
RL setup popularized by OpenAI Gym.
EnvFactory
- createEnvs(num_processes, env_type, env_config={}, planner_config={})[source]
Wrapper function to create either a single env the the main process or some number of envs each in their own seperate process.
- Parameters
num_processes (int) – Number of envs to create
env_type (str) – The type of environment to create
env_config (dict) – Intialization arguments for the env
planner_config (dict) – Intialization arguments for the planner
- Returns
SingleRunner or MultiRunner containing the environment
- Return type
EnvRunner
- createMultiprocessEnvs(num_processes, env_type, env_config={}, planner_config={})[source]
Create a number of environments on different processes to run in parralel
- Parameters
num_processes (int) – Number of envs to create
env_type (str) – The type of environment to create
env_config (dict) – Intialization arguments for the env
planner_config (dict) – Intialization arguments for the planner
- Returns
MultiRunner containing all environments
- Return type
- createSingleProcessEnv(env_type, env_config={}, planner_config={})[source]
Create a single environment
- Parameters
env_type (str) – The type of environment to create
env_config (dict) – Intialization arguments for the env
planner_config (dict) – Intialization arguments for the planner
- Returns
SingleRunner containing the environment
- Return type
EnvRunner
- class MultiRunner(env_fns, planner_fns)[source]
Runner which runs mulitple environemnts in parallel in subprocesses and communicates with them via pipe.
- Parameters
env_fns (list[function]) – Env creation functions
planner_fns (list[function]) – Planner creation functions
- gatherDeconstructTransitions(planner_episode)[source]
Gather deconstruction transitions and reverse them for construction
- Parameters
planner_episode (-) – The number of expert episodes to gather
Returns: list of transitions. Each transition is in the form of ((state, in_hand, obs), action, reward, done, (next_state, next_in_hand, next_obs))
- getNextAction()[source]
Get the next action from the planner for each environment.
- Returns
Actions
- Return type
numpy.array
- loadFromFile(path)[source]
Loads the state of the environments from a file.
- Parameters
path (str) – The path to the environment states to load
- Returns
Flag indicating if the loading succeeded for all environments
- Return type
bool
- reset_envs(env_nums)[source]
Resets the specified environments.
- Parameters
env_nums (list[int]) – The environments to be reset
- Returns
Observations
- Return type
numpy.array
- saveToFile(path)[source]
Saves the current state of the environments to file.
- Parameters
path (str) – The path to save the enviornment states to
- step(actions, auto_reset=False)[source]
Step the environments synchronously.
- Parameters
actions (numpy.array) – Actions to take in each environment
auto_reset (bool) – Reset environments automatically after an episode ends
- Returns
(observations, rewards, done flags)
- Return type
(numpy.array, numpy.array, numpy.array)
- class SingleRunner(env, planner=None)[source]
RL environment runner which runs a single environment.
- Parameters
env (BaseEnv) – Environment
planner (BasePlanner) – Planner
- loadFromFile(path)[source]
Loads the state of the environment from a file.
- Parameters
path (str) – The path to the environment state to load
- Returns
Flag indicating if the loading succeeded
- Return type
bool
Configuration Parameters
A task in BulletArm is defined as the combination of the environment and the configuration passed to that environemnt. The environment details the high level details for the task i.e. the initial state, goal state, invalid states, etc. The configuration contains lower level details which can add to task variety. The default config can be found here. We briefly detail the various config parameters below but additional information can be found in the default config.
Parameter |
Example |
Description |
|---|---|---|
render |
False/True |
Render the PyBullet GUI or run headless |
max_steps |
10 |
The maximum number of steps per episode. |
workspace |
[[0, 0.2], [0, 0.2], [0, 0.2]] |
The workspace in terms of the range in x, y, and z. |
workspace_check |
point/bounding_box |
How to determine if a object is within the workspace by either check the COM of the object of the bounding box. |
robot |
kuka |
The type of the robot to use in the simulator. |
action_sequence |
pxyzr |
The action space the agent will act within. ‘pxyzr’ defines a 5-vector action including the gripper action (p), the position of the gripper (x,y,z), and its top-down rotation (r). |
obs_size |
128 |
The pixel size of the heightmap. |
in_hand_size |
24 |
The pixel size of the in-hand image. |
random_orientation |
True |
Whether or not to generate objects with a random orientation |
object_scale_range |
[0.6, 0.7] |
The scale applied to objects in the workspace. Addes variation and helps with generalization. |
fast_mode |
False/True |
If True, teleports the arm when possible to speed up simulation. Bad for more dynamical domains & closed-loop control. |
phyics_mode |
fast, slow |
The type of physics to use during simulation. Can be run faster with less accurate physics or slower with more accurate physics. |
num_objects |
3 |
Specifies the number of objects to generate in domains which have a variable number of objects. |
Robots
Different robotic arms can lead to drastically different policies due to the differing kinematics between arms. We provide four robotic arms: KUKA IIWA, Frane Emika Panda, Universal Robots UR5 with a parallel jaw gripper, and Universal Robots UR5 with Robotiq 2F-85 gripper. To add a new manipulator see the new robot tutorial.
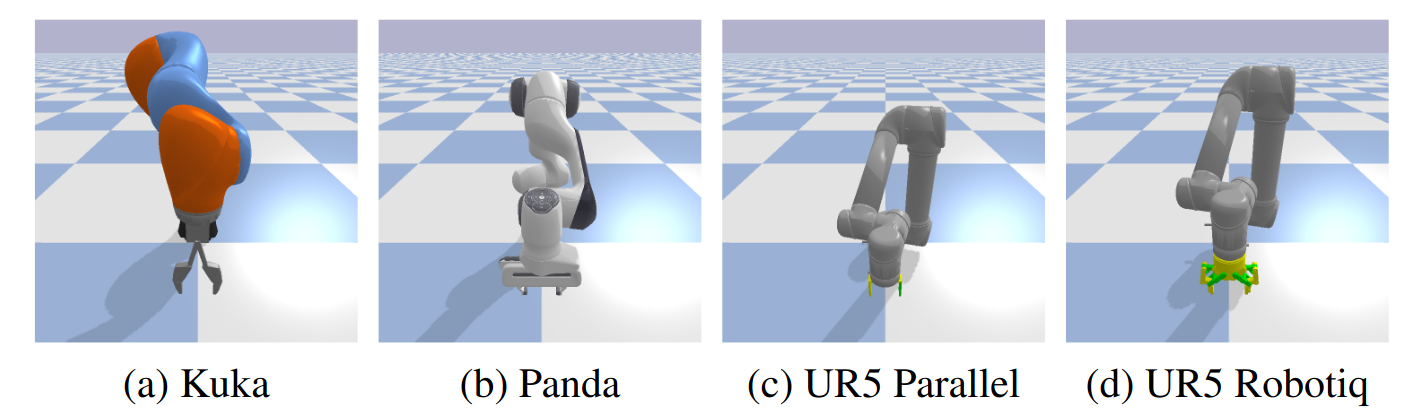
Currently supported robotic arms.
Objects
We provide a number of objects to use out-of-the-box when creating new tasks. The list of avaliable objects can be
seen below. Objects are generating within the workspace by using the _generateShapes function in the base
enviornment. Objects are identified by their ID which is located in bulletarm/pybullet/utils/constants.py.
To add a new object see the new object tutorial.
Object |
|---|
Cube |
Sphere |
Cylinder |
Cone |
Brick |
Triangle |
Roof |
Teapot |
Teapot Lid |
Cup |
Bowl |
Plate |
Spoon |
Bottle |
Box |
Pallet |
Test Tube |
Swab |
Flat Block |
Random Household 200 |
Grasp Net |
- _generateShapes(self, shape_type=0, num_shapes=1, scale=None, pos=None, rot=None, min_distance=None, padding=None, random_orientation=False, z_scale=1, model_id=1)
Generate objects within the workspace.
Generate a number of objects specified by the shape type within the workspace.
- Parameters
shape_type (int) – The shape to generate. Defaults to 0.
num_shapes (int) – The number of objects to generate. Deafults to 1.
scale (double) – The scale for the entire object. Defaults to None.
pos (list[double]) – Generate object at specified position. Defalts to None.
rot (list[double]) – Generate object at specified orientation. Defaults to None,
min_distance (double) – Minimum distance objects must be from other objects. Defaults to None.
padding (double) – Distance from edge of workspace that objects can be generated in. Defaults to None.
random_orientation (bool) – Generates objects with a random orientation if True. Defaults to False.
z_scale (double) – The scale for the objects Z axis. Defaults to 1.
model_id (int) – Used to specify the specific object within a class of object shapes. Defaults to 1.
- Returns
PyBullet IDs for the generated objects
- Return type
list[int]