Benchmark Tasks
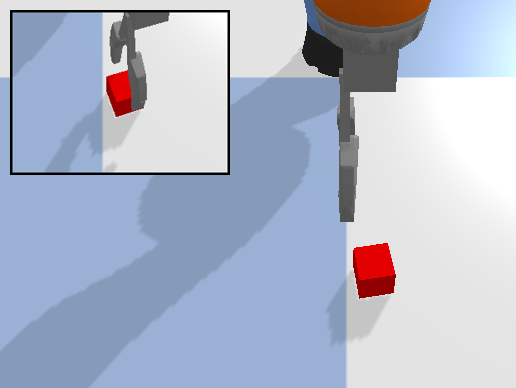
Block Reaching
Block Pushing
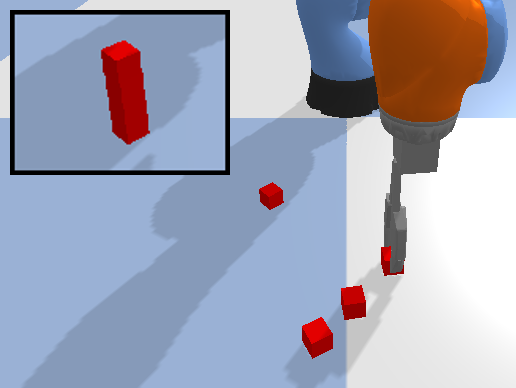
Block Pulling
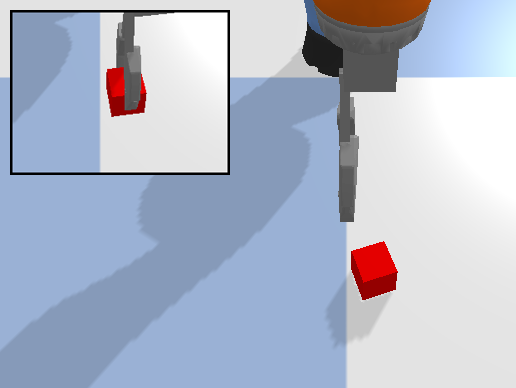
Block Picking
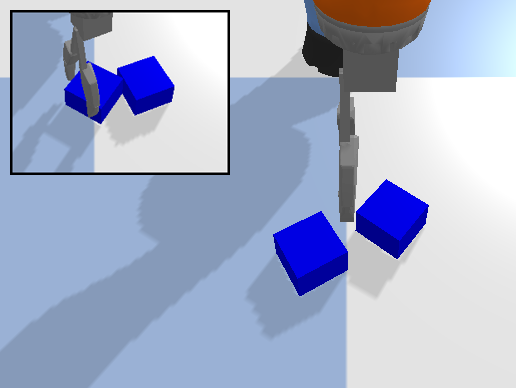
Block Stacking
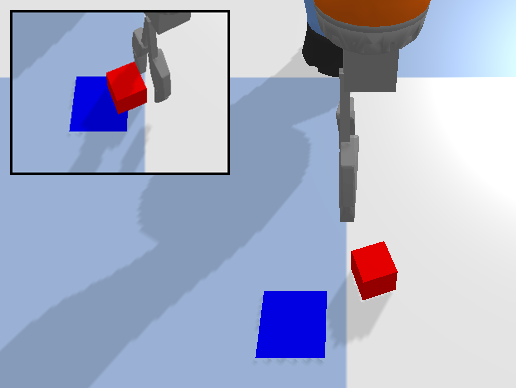
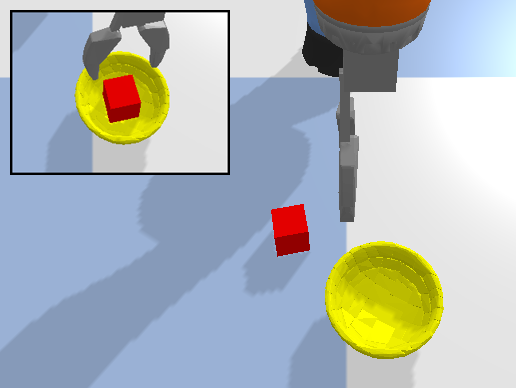
Block In Bowl
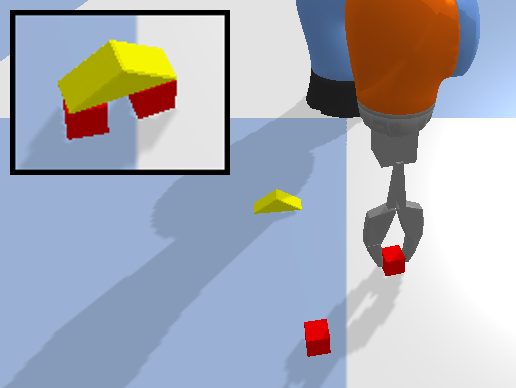
House Building 1
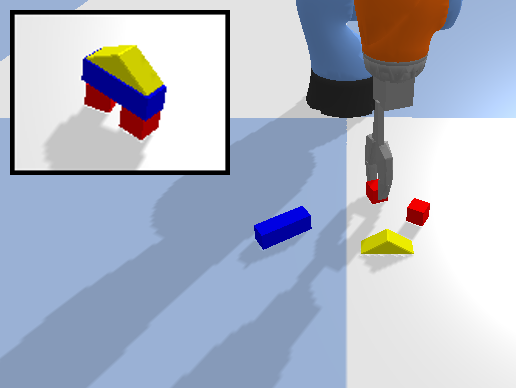
House Building 2
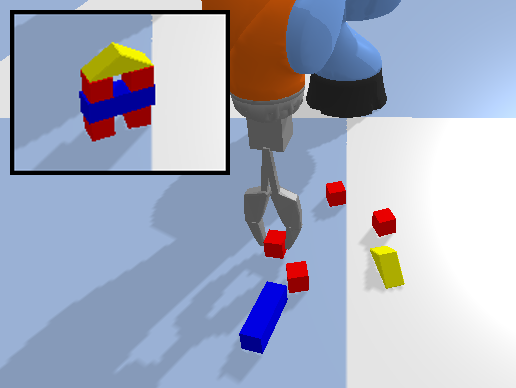
House Building 3
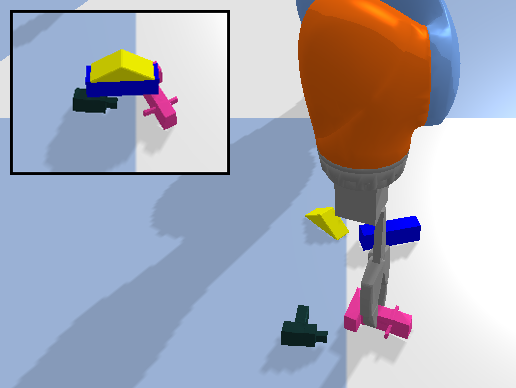
House Building 4
- class HouseBuilding4Env(config)[source]
Open loop house building 4 task.
The robot needs to: (1) place two cubic blocks adjacent to each other, (2) put a cuboid on top of the two cubic bricks, (3) put another two cubic blocks on top of the cuboid, (4) put a root on top of the structure.
- Parameters
config (dict) – Intialization arguments for the env
Improvise House Building 2

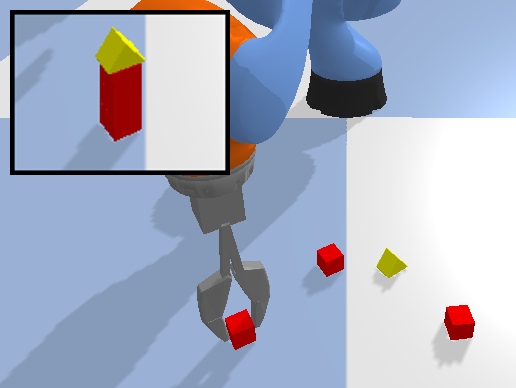
Improvise House Building 3
- class ImproviseHouseBuilding3Env(config)[source]
Open loop improvise house building 3 task.
The robot needs to: (1) place two blocks adjacent to each other, (2) put a cuboid on top of the two cubic bricks, (3) put a roof on top of the cuboid. The two base blocks are randomly generated shapes.
- Parameters
config (dict) – Intialization arguments for the env
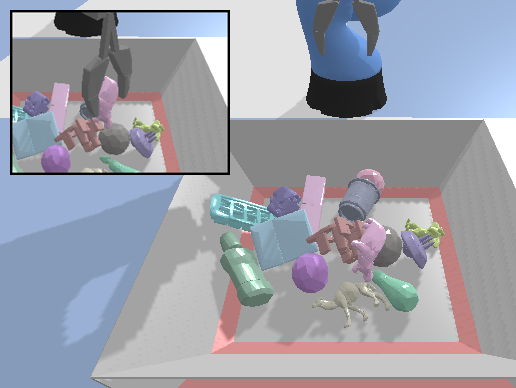
Bin Packing

Bottle Arrangement

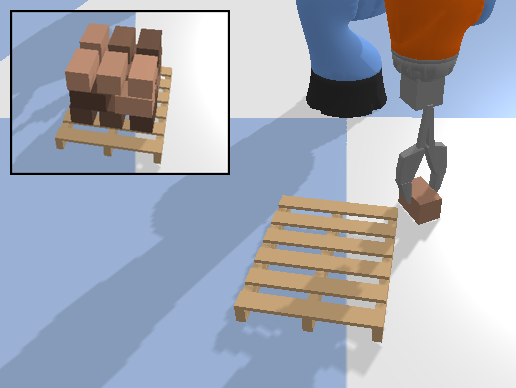
Box Palletizing
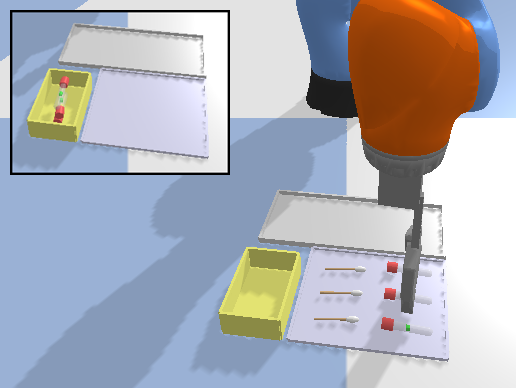
Covid Test
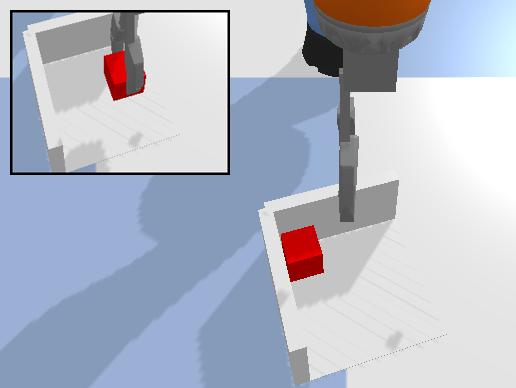
Corner Picking
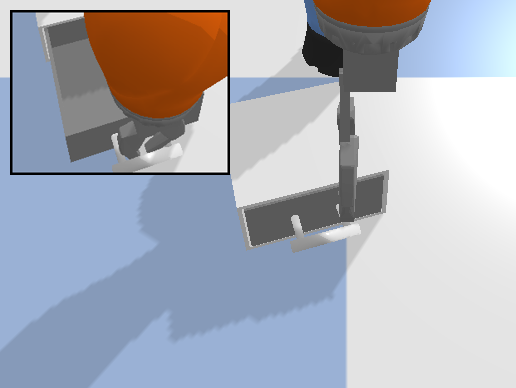
Drawer Opening
Object Grasping